Puppy Linux
¿Cómo instalarlo?

Puppy Linux puede ser instalado de diversas maneras. No es complicado, lo único que se requiere es una imagen ISO, un dispositivo de almacenamiento y alguna herramienta para instalarlo. Pero antes de entrar en materia creo necesario establecer las clasificaciones necesarias.
Según el método de instalación
- Utilizando las herramientas de instalación propias de Puppy
Puppy viene con una herramientas de autoinstalación, Puppyinstaller la cual permite instalarlo en diversos medios y modos
- Con la herramienta grub4dos
Puppy trae instalada esta herramienta que permite instalar un menú de arranque qué lo incluya a si mismo y a todos los demás Sistemas Operativos que coexistan en un equipo
- Con la herramienta grub2
Con esta herramienta puedes hacer lo mismo que con la anterior pero instalando este conocido sistema multi arranque
- Con herramientas externas
Entre ellas se encuentran YUMI, Balena Etcher, UNEtbootin, Ventoy, entre otras
Según el modo de instalación
- Instalación frugal
Es el modo recomendado ya que solo en modo frugal Puppy es capaz de dar todas sus ventajas y características únicas. Consiste en un puñado de archivos sfs en una partición obligados a arrancar por algún método de booteo de los ya descritos.
- Instalación en modo full, como cualquier otra distro
Este modo no es para nada recomendable. Suele ser bastante cargado de bugs y comportamientos inesperados (según dicen yo nunca lo he utilizado). De ser cierto lo anterior yo abogaría porque sea desechado de una vez y no aparezca como opción.
Según el medio dónde se instala
- DVD
- Memoria USB
- Tarjetas SD
- USB HDD
- HDD interno
Puppy en modo frugal puede ser instalado de modo que pueda arrancar desde prácticamente cualquier dispositivo de almacenamiento.
Pero en este tutorial vamos a concentrarnos en instalar Puppy según lo que yo llamo "fuerza inteligente" ya que los demás métodos de instalación son prácticamente auto explicativos según la herramienta utilizada. O sea, usaremos la fuerza pero en vez de bruta, lo haremos de modo inteligente.
Para ello necesitamos un sistema operativo funcional, el ISO de Puppy, un medio dónde instalarlo, las herramientas grub4dos y grub2.
Yo lo haré desde un Puppy activo.
Metiendo cañona
1- Primeramente insertamos el USB sin montarlo. Después acudimos a la herramienta Gparted (u otro particionador) y creamos una partición FAT32 (usaremos este sietema de archivos puesto que, al Puppy consistir en archivos sfs, puede ser instalado en este tipo de sistema y de este modo podremos utilizar la USB para que sea reconocida por Windows) Una vez formateada, le aplicamos el flag boot.
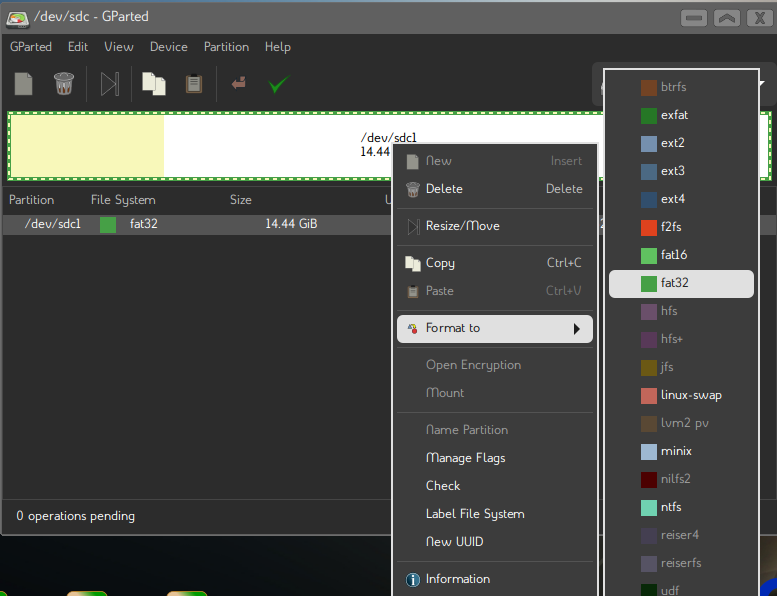
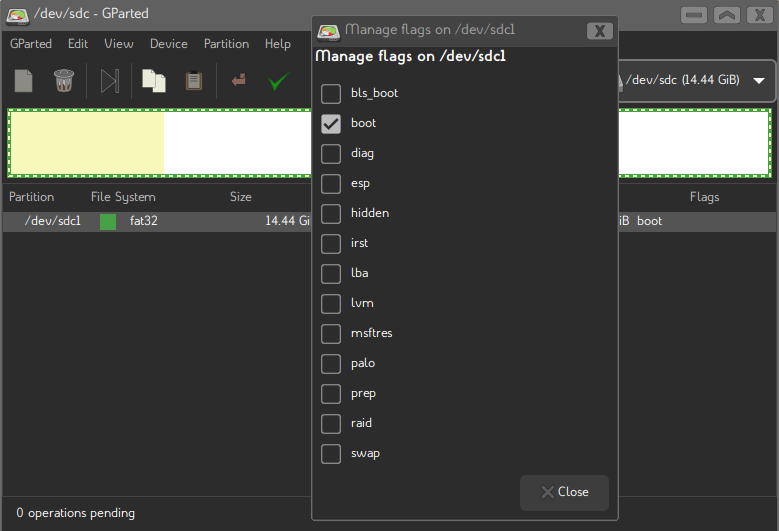
Formateando el USB
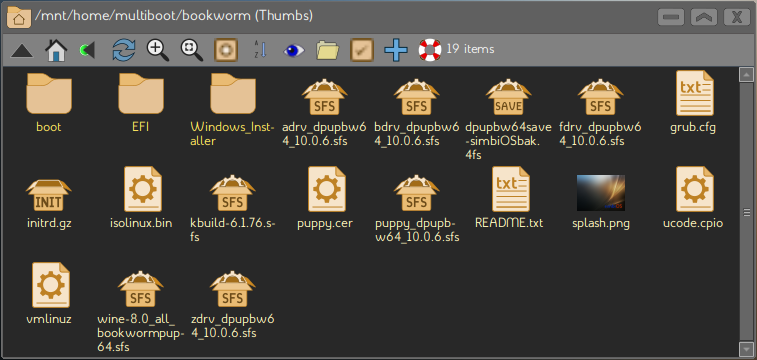
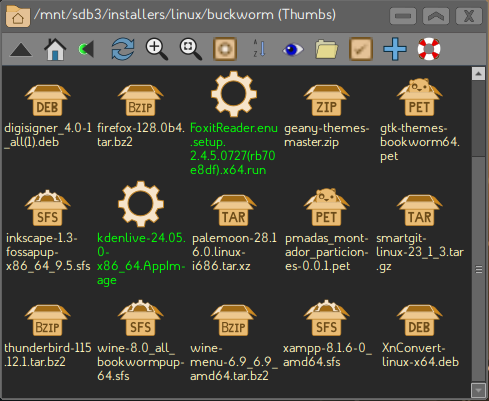
2- A continuación cerramos Gparted y abrimos el USB. Buscamos el ISO de Puppy, lo montamos y copiamos su contenido en la memoria, en este caso sdc1.
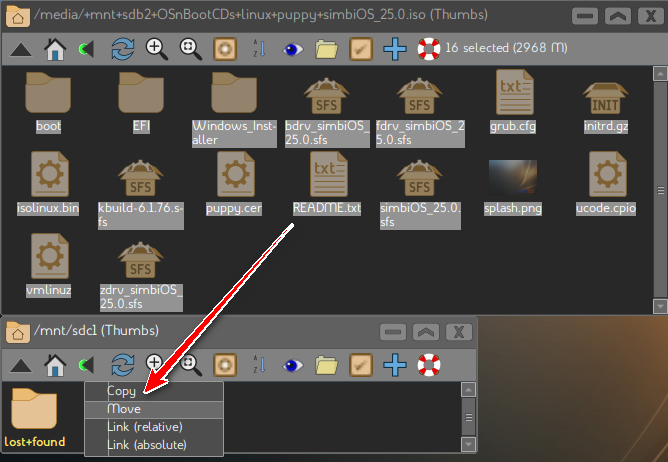
Copiando los archivos de Puppy en el USB
3- Ya tenemos Puppy en el USB. Ahora toca hacerlo booteable. Primeramente lo haremos con Grub4dos.
Usando Grub4dos para hacer el USB booteable
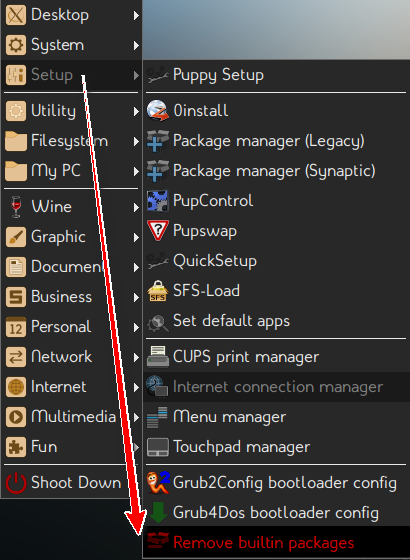
4- Buscamos la herramienta en el Menú y la ejecutamos. Seleccionamos las opciones que muestra la imagen (ver bien que se seleciona el USB sdc1) y le damos OK.
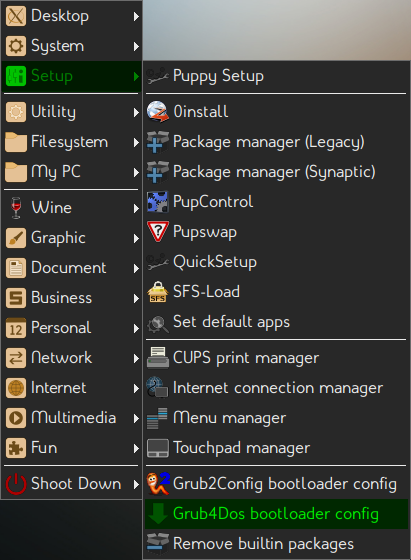
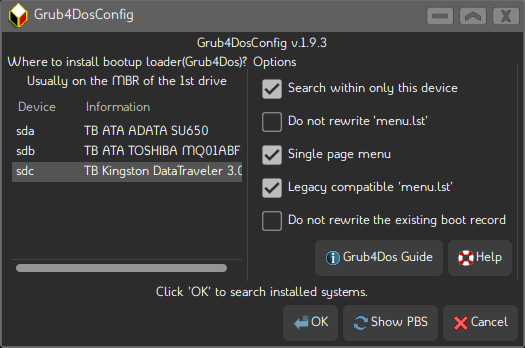
Poniendo las opciones en Grub4dos
4.1- A continuación nos sale una ventana con la opción principal de booteo. Aquí le podemos añadir copy al pfix para que nuestra opción principal cargue el archivo de salva una vez que exista. Quedaría entonces pfix=copy,fsck (ver imagen). Le damos OK y también a la ventana de confirmación.
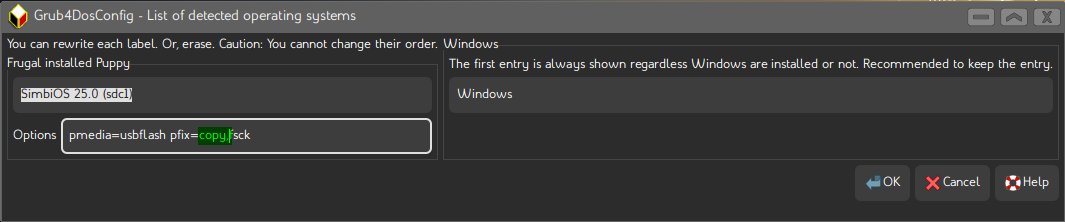
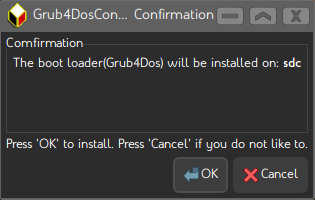
Poniendo las opciones en Grub4dos
4.2- Ya Grub4dos quedó instalado y en la ventana siguiente te da algunas informaciones y un botón para editar el menu.lst que es el archivo que conforma el menú del grub. Le damos y nos abrirá un editor de texto con el archivo.
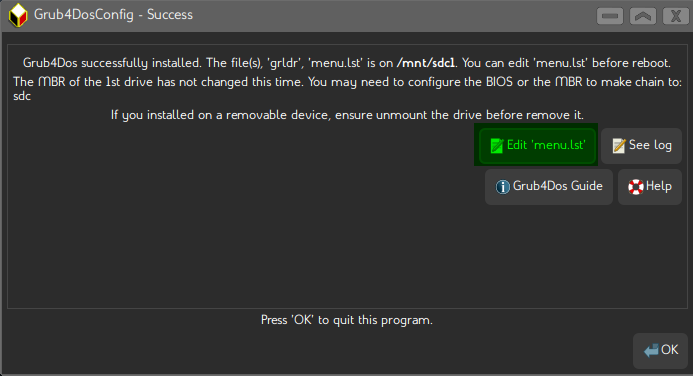
Finalizando Grub4dos
4.3- En el menu.lst vamos a eliminar todo lo que está tachado en rojo ya que son las entradas para bootear Windows y no creo que sean necesarias aquí, aunque las puedes dejar. Al finalizar guardamos, cerramos el archivo y el editor y le damos OK a la ventana anterior que aún estará abierta.
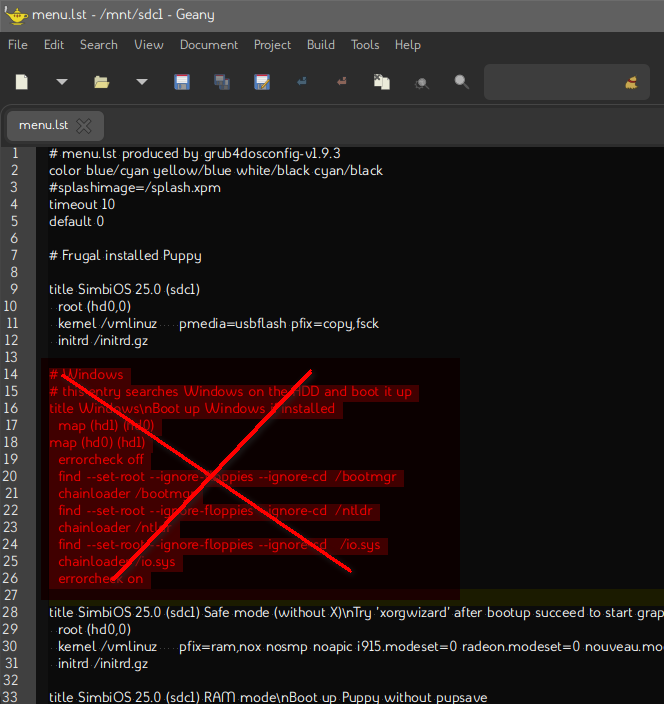
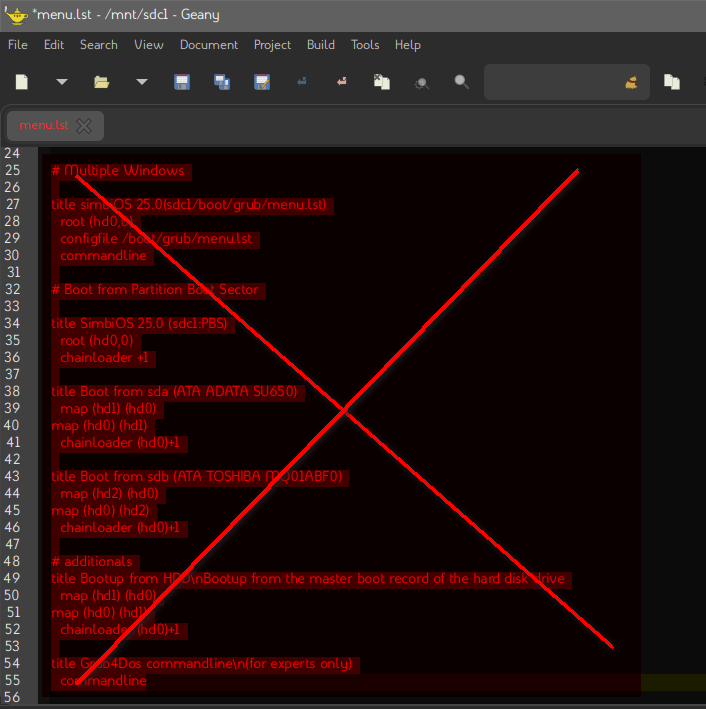
Editando el menu.lst
4.5- Finalmente el menu.lst quedará así.
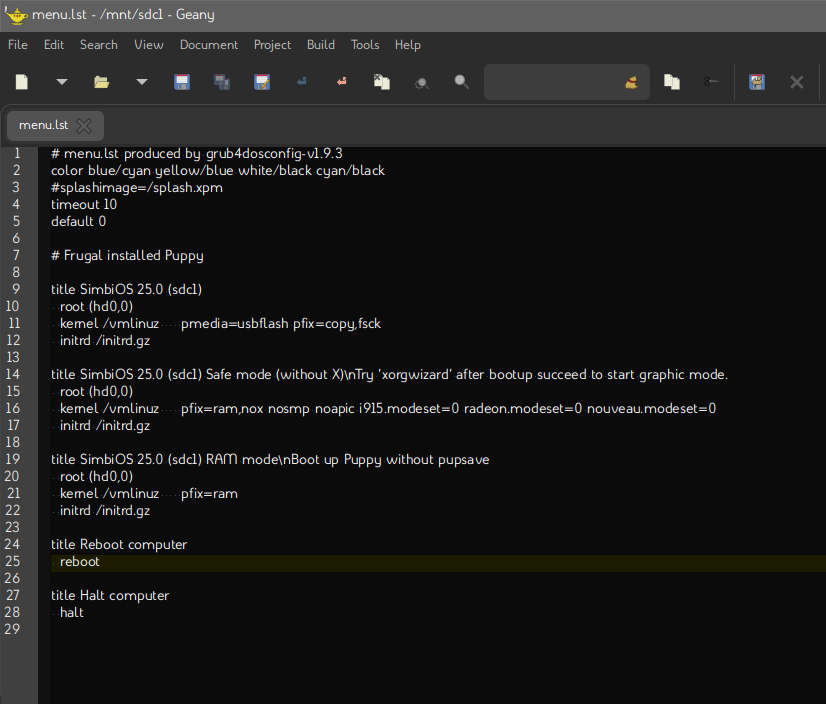
menu.lst definitivo
4.6- Abrimos el USB y veremos que Grub4dos solo ha añadido dos archivos, el grldr y el menu.lst, en la imagen señalados en verde. Si queremos ahorrar espacio y tener una mirada más limpia, podemos eliminar todos los archivos señalados en rojo ya que no son necesarios.
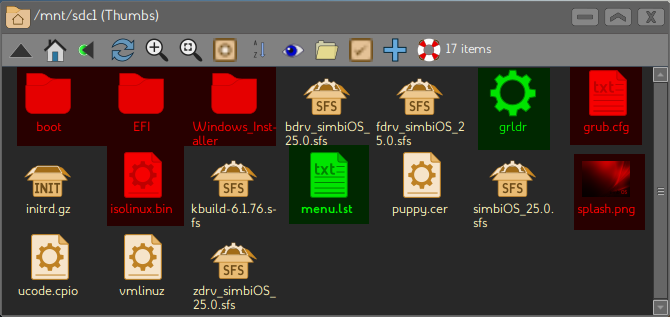
Limpiando la instalación
4.7- Ya Puppy Linux ha quedado instalado en modo frugal y el dispositivo es booteable.
Usando Grub2 para hacer el USB booteable
5- Buscamos la herramienta en el Menú y la ejecutamos. Seleccionamos las opciones que muestra la imagen (ver bien que se seleciona el USB sdc1) y le damos OK.
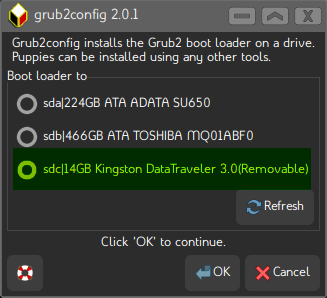
Poniendo las opciones en Grub2
5.1- A continuación ponemos la configuración que nos muestra la imagen y le damos OK. Nos saldrá una ventana con la opción principal de booteo. Aquí le podemos añadir copy al pfix para que nuestra opción principal cargue el archivo de salva una vez que exista. Quedaría entonces pfix=copy,fsck (ver imagen). Le damos OK.
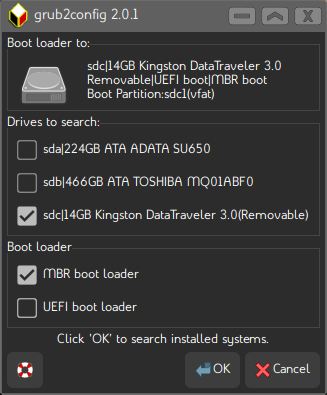
Poniendo las opciones en Grub2
5.2- Ya Grub2 quedó instalado y en la ventana siguiente te da algunas informaciones y un botón para editar el grub.cfg que es el archivo que conforma el menú del grub. Le damos y nos abrirá un editor de texto con el archivo.
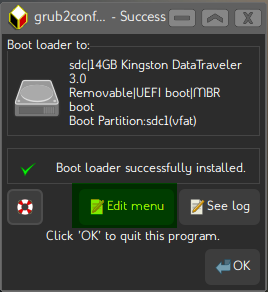
Finalizando Grub2
5.3- En el grub.cfg vamos a eliminar todo lo que está tachado en rojo ya que son las entradas para bootear Windows y no creo que sean necesarias aquí, aunque las puedes dejar. Tambien vamos a añadir las entradas en verde para tener el set completo con las principales opciones de booteo que ofrece Puppy Linux. Al finalizar guardamos, cerramos el archivo y el editor y le damos OK a la ventana anterior que aún estará abierta.


Editando el grub.cfg
5.4- Si te fijas, la última entrada del grub.cfg es 'Previous menu' (menú previo) y su parte activa nos remite al archivo grub-prev.cfg. ¿De dónde salió este archivo? Fijate que cuando copiaste el contenido de ISO en el USB venía un archivo grub.cfg que trae las opciones de booteo de Puppy Linux, pues bien, ese archivo la herramienta Grub2 lo ha convertido en grub-prev.cfg y a traves de esa última entrada del grub.cfg podemos acceder a ese otro menú. Pero, ese menú venia para un cd y ahora hemos instalado en un USB. Entonces abrimos grub-prev.cfg en el editor de texto y con la herramienta de sustitución vamos a cambiar en todo el documento pmedia=cd por pmedia=usb. Guardamos y listo.
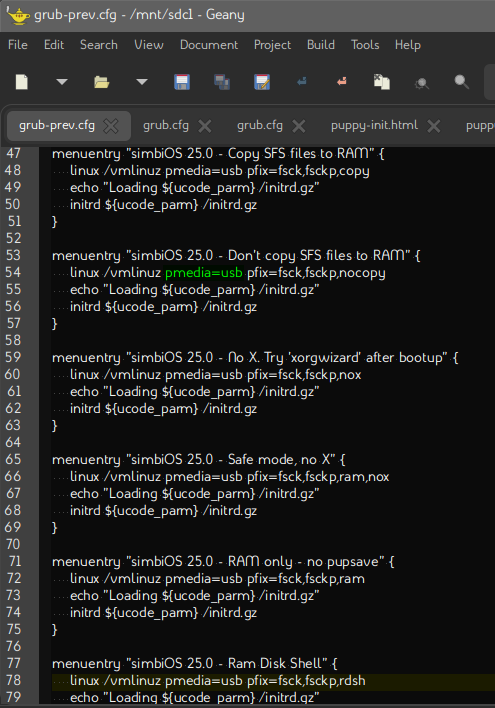
grub-prev.cfg arreglado para USB
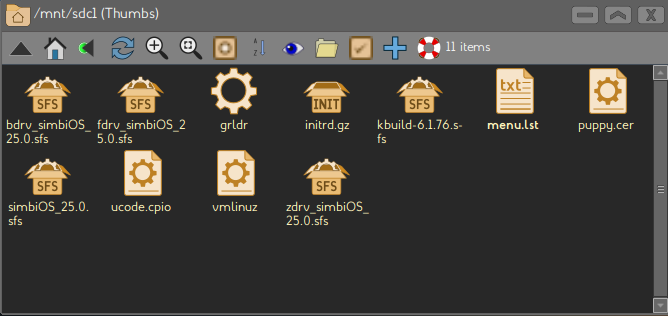
5.5- Abrimos el USB y veremos que Gru2 ha añadido varios archivos y carpetas, en la imagen señalados en verde. Si queremos ahorrar espacio y tener una mirada más limpia, podemos eliminar todos los archivos señalados en rojo ya que no son necesarios.
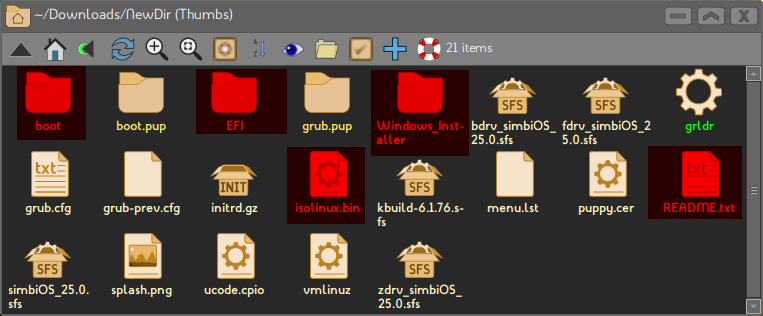
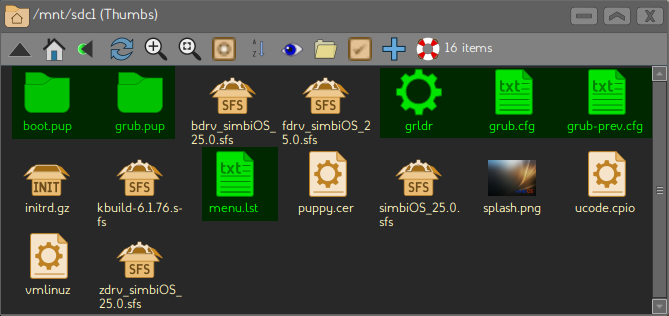
Limpiando la instalación
5.6- Ya Puppy Linux ha quedado instalado en modo frugal y el dispositivo es booteable.
Levantando nuestro Puppy Linux
6- Antes que nada debemos asegurarnos de que nuestra PC bootea por USB y de que tiene esa opción en primer lugar. Las PC más modernas tienen una opción de un menú de booteo que generalmente se accede con F12. Las más antiguas habrá que entrar al bios, normalmente con F2, y configurar el orden de arranque.
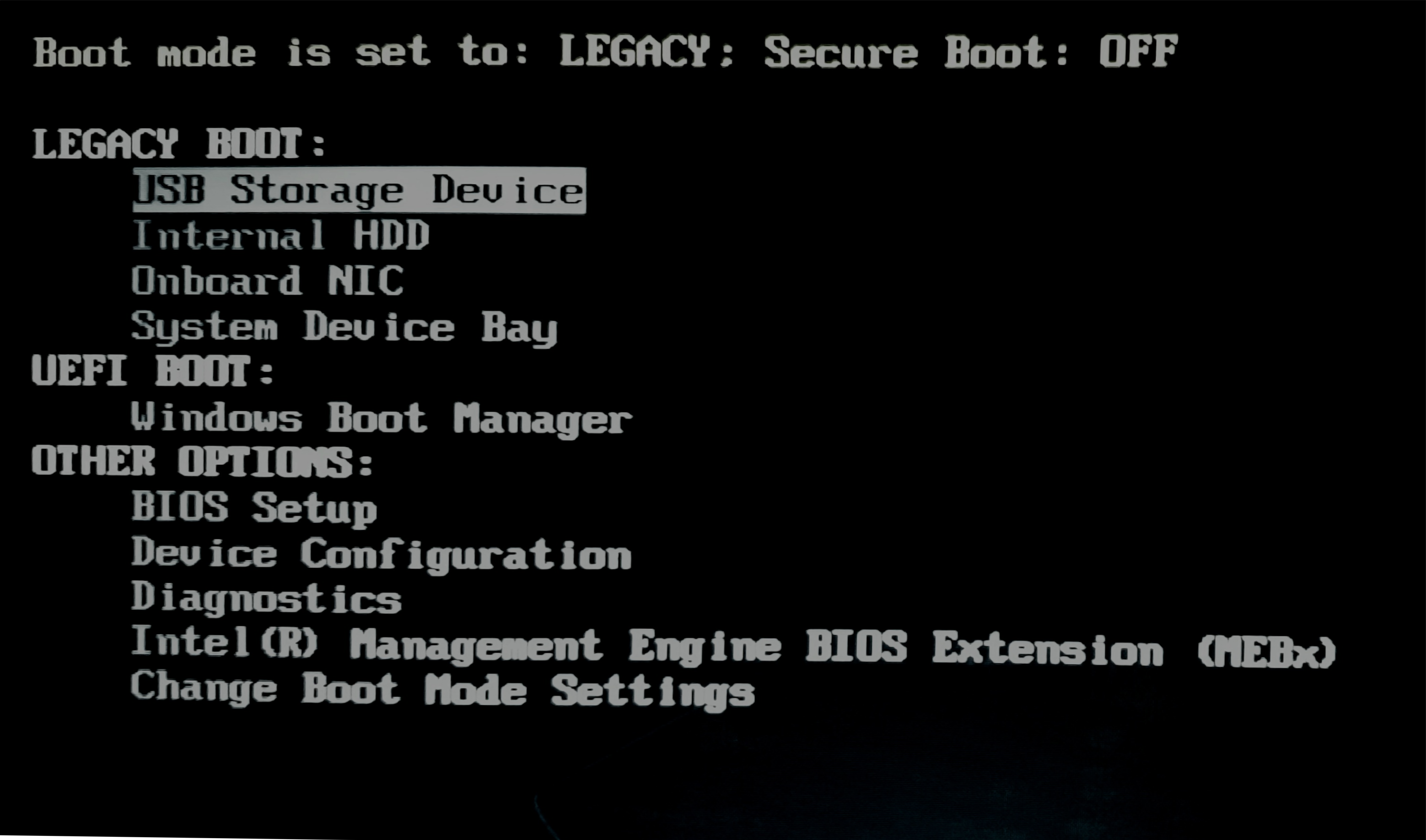
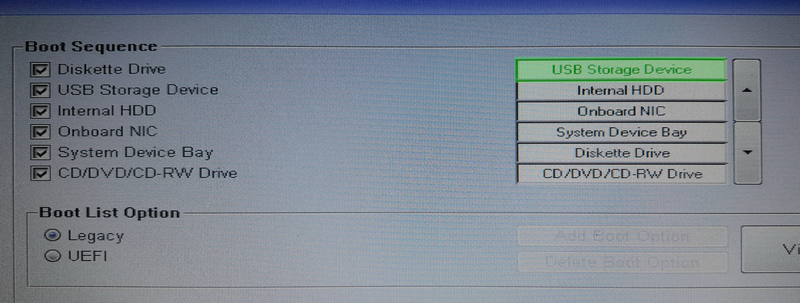
Menú de arranque de la PC y Configuración del bios
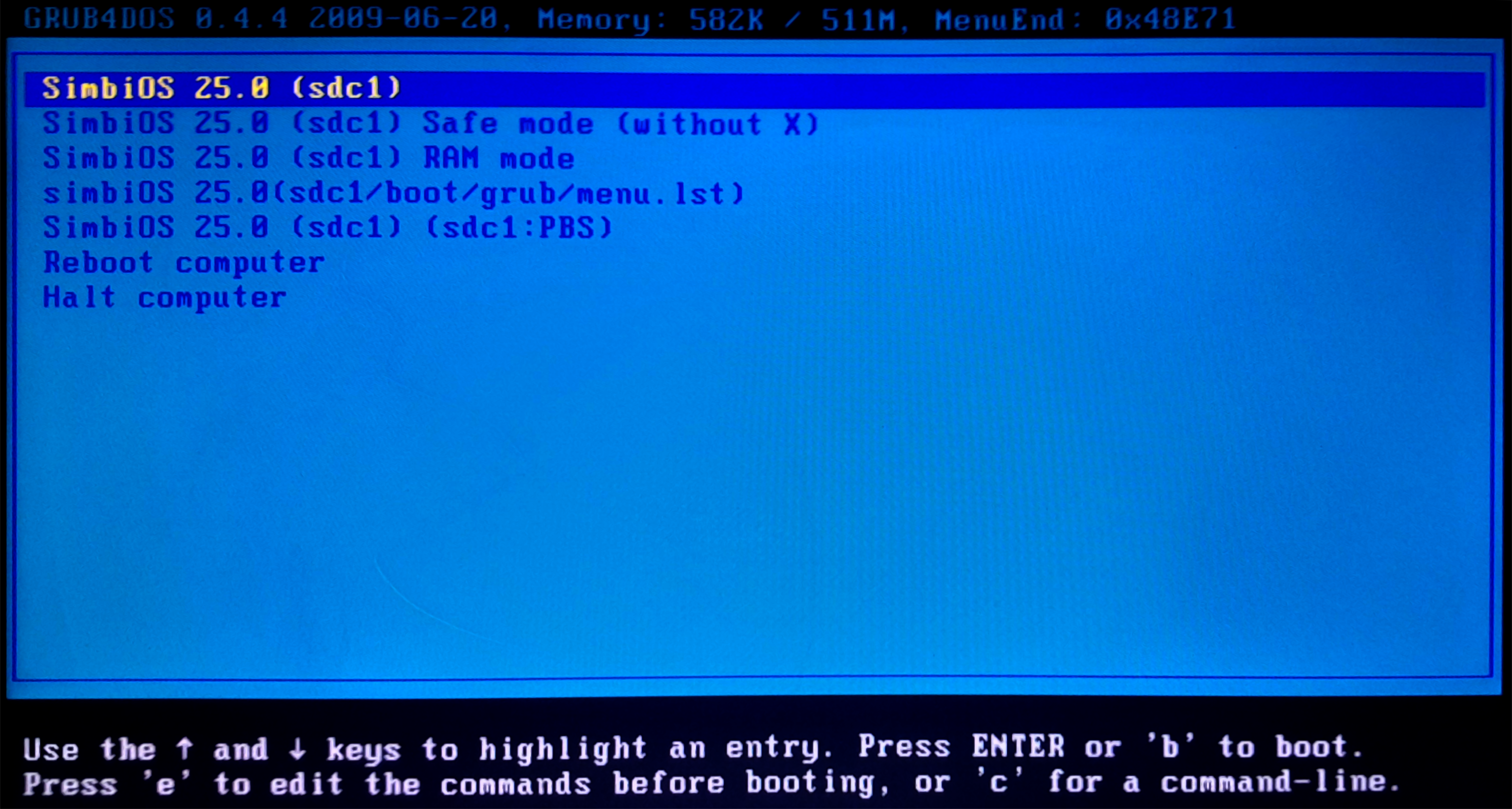
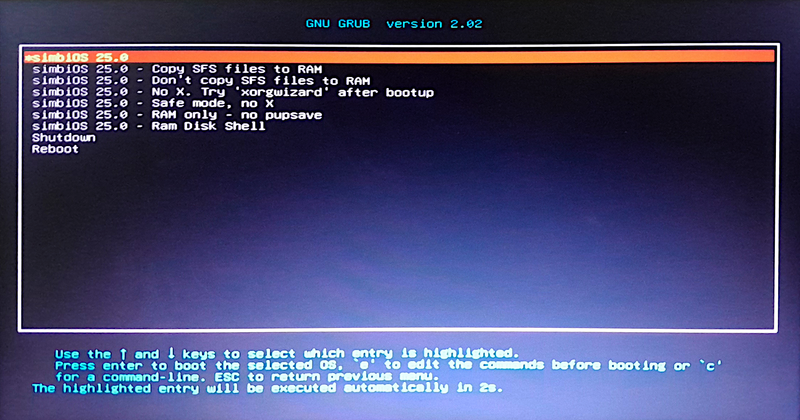
Booteando desde la configuración de Grub4dos
7- Menú de opciones del Grub4dos. Escogemos la primera opción y damos Enter. VOILA!!!! Puppy Linux está arrancando.
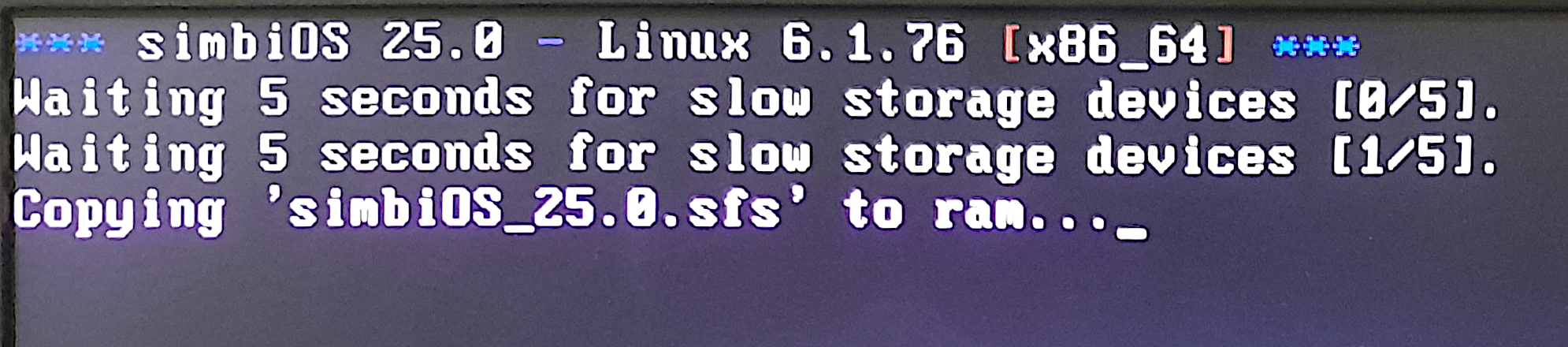
Booteando desde la configuración de Grub4dos y Secuencia de arranque del init de Puppy Linux
Booteando desde la configuración de Grub2
8- Menú de opciones del Grub2. Podemos escoger la primera opción al igual que cualquier otra, pero escogeremos la última opción, Previous Menu y damos Enter. Eso nos lleva al menú de arranque original de Puppy y allí si escogemos la primera opción.
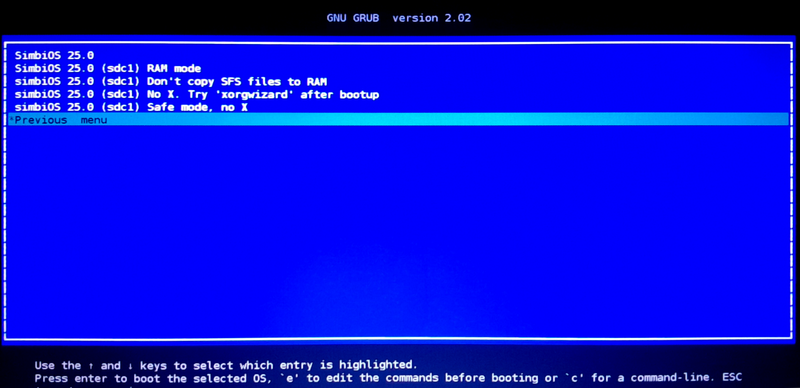
Booteando desde la configuración de Grub2 y Accediendo al arranque original de Puppy Linux
9- Puppy Linux listo para la acción. Si te fijas, el USB está marcado en el borde superior derecho de color naranja, en este tema de iconos eso significa que esa es la partición activa dónde está Puppy Linux. Esta partición no se deja desmontar, aunque, siendo un USB, lo puedes quitar en cualquier momento si estás dispuesto a correr el riesgo de que se dañe.
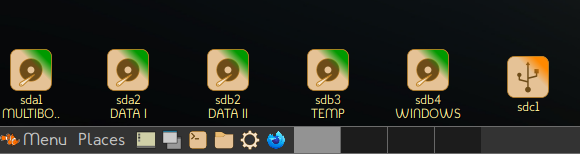
Partición activa y Puppy Linux listo para la acción
Guardando sesión
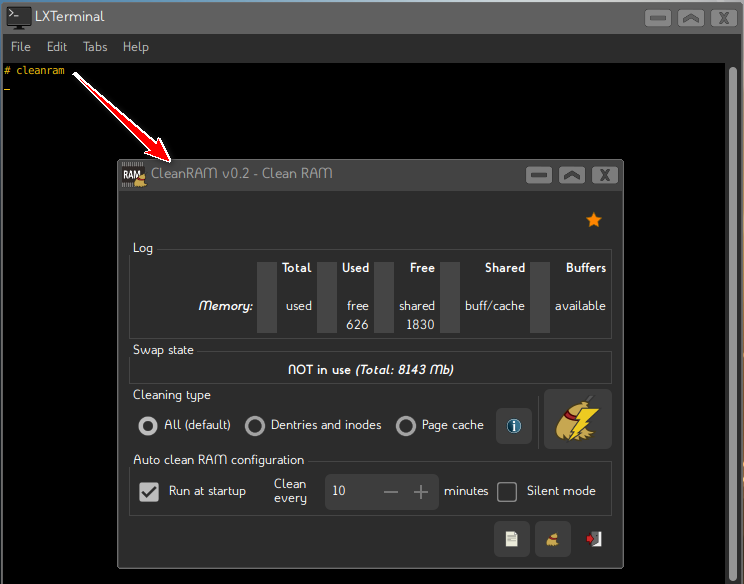
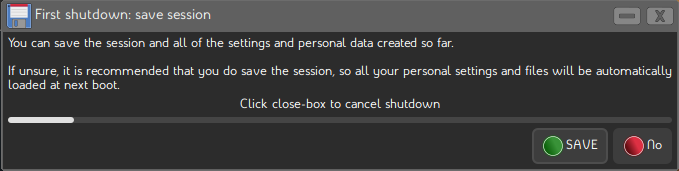
10- Siendo Puppy Linux un sistema live que corre completamente desde la RAM, a diferencia de otros sistemas live, este te permite guardar los cambios que hagas. Para ello, cuando cierres el sistema, Puppy Linux te ofrecera guardar sesión. Dile que si y sigue las instrucciones.
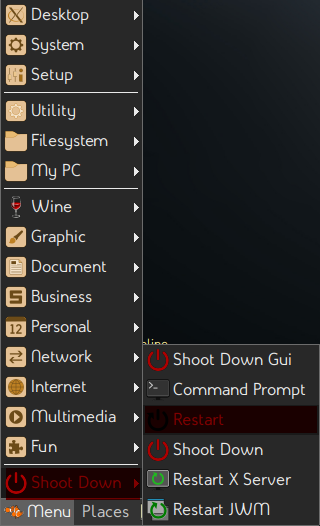
Finalizando Puppy Linux
11- Creando el pupsave o archivo de salva.
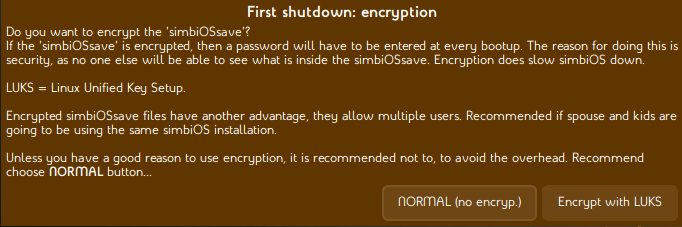

12- Llegados a este punto creo necesario aclarar que es aquí dónde podemos convertir a Puppy Linux en un sistema multi sesión o multi usuario. ¿Cómo? Fácil, yo nombraré el pupsave "misalva", pero, si levantas el sistema varias veces en modo RAM, cada vez que lo apagues puedes crear un nuevo pupsave. Así puedes crear, por ejemplo "María" para tu esposa, "Lianet" para tu hija, "Marcos" para tu hijo y a cada uno ponerle su respectiva contraseña.
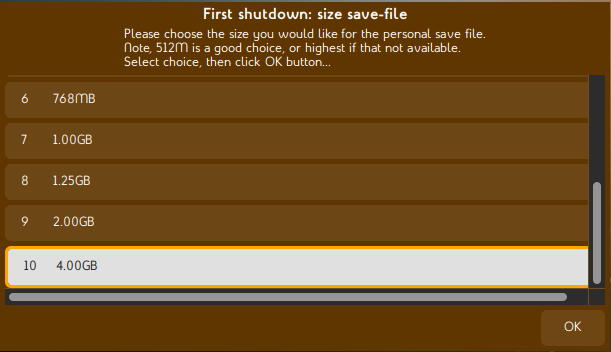
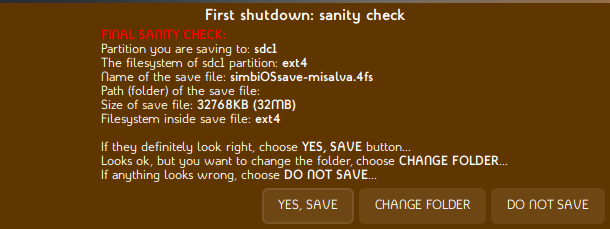
13- Finalmente chequeas que todo esté bien, y de ser así le das OK, o puedes regresar atrás y corregir o cancelar.
14- Cuando Puppy Linux termine de crear el archivo de salva, la máquina se apagará. Cuando reinicies verás un nuevo icono en el escritorio, "save". Este icono es un enlace directo a una herramienta que trabaja en al background y cuya función es guardar los cambios en el pupsave. No obstante, si apagas el sistema sin haber presionado este icono, los cambios igualmente se guardarán.

Durante el apagado puedes comprobar que se está guardando la sesión. Ver la primera línea de la secuencia.
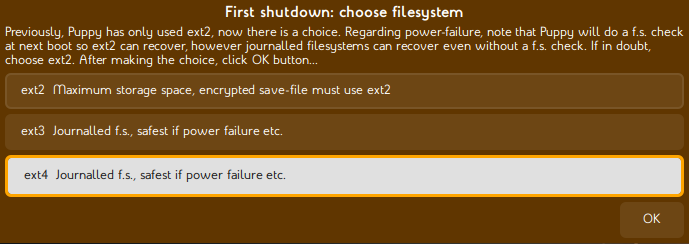
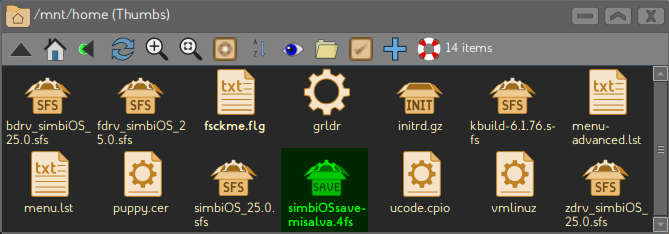
Aquí se muestra el archivo de salva, o pupsave, en el USB. También verás un archivo temporal llamado "fsckme.flg" que contiene una sola línea con la ruta al archivo de salva, con la siguiente estructura /sdc1/puppysave-nombrequelepusiste.4fs, donde puppy es el nombre de ese puppy y nombrequelepusiste es el nombre que le asignaste a esa salva. En caso de ser salva con contraseña, entonces la estructura será /sdc1/puppysave_luks-nombrequelepusiste.4fs donde luks es el nombre de la aplicación que maneja la contraseña y el encriptado. El 4fs es por el sistema de archivo que escogiste para ser contenido por la salva, en este caso ext4. Pero puede ser 2fs para ext2 y 3sf para ext3.
Conclusiones
Este método puede abreviarse si tienes ya algún dispositivo booteable desde el cuál puedas copiar los archivos que crean el Grub4dos y/o el Grub2, solo tendrías que editar correctamente el menu.lst y/o el grub.cfg para que apunten correctamente al vmlinuz y al initrd.gz. Igualmente esté método es válido para instalar Puppy Linux en una microSD, un USBHDD o en un HDD interno. En este último caso, si ya tienes una partición booteable, lo único que tienes que crear un directorio, ponerle un nombre (puppytal por ejemplo), copiar dentro los archivos del ISO y crear un nuevo archivo cfg y configurarlo para que apunte correctamente al directorio que contiene los archivos de Puppy Linux.
Para referencia acerca de las opciones de arranque de Puppy Linux.